出品/未来科技界
作者/张永堃
编辑/李彦
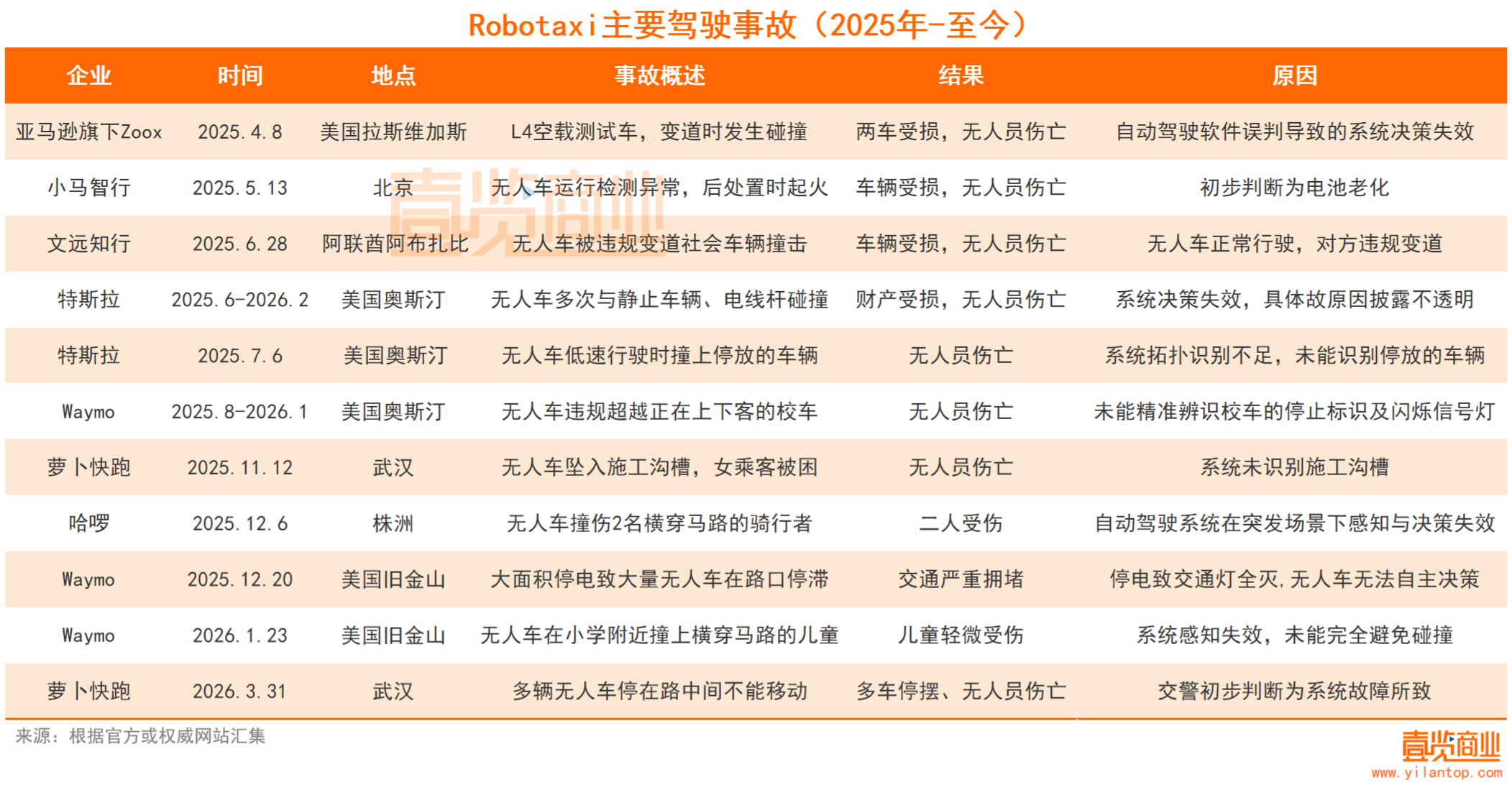
2026年3月31日晚,武汉街头的一幕,打破了人们对无人驾驶的部分乐观预期。多辆由百度运营的“萝卜快跑”无人驾驶出租车,在行驶过程中集体停滞于道路中央,导致后方车流拥堵。警方通报显示,事故初步判断为系统故障,并已排除外部干扰因素。尽管未造成人员伤亡,但相关画面在社交平台迅速传播,引发了公众对Robotaxi可靠性的再度讨论。
这并非萝卜快跑首次因故障问题引发关注。2025年,萝卜快跑亦曾出现因未能识别施工区域而驶入沟槽的事件。个案的不断累积,使这一原本被视为国内Robotaxi商业化标杆的产品,不断面临来自公众层面的信任考验,也让整个行业再次直面技术落地的现实难题。
2025年以来,随着Robotaxi逐步进入规模化运营阶段,全球范围内不断发生引发广泛关注的Robotaxi事故,据壹览商业统计,事故涉及Waymo、小马智行等中美主流企业,无人车在不同城市的实际运行中,均不同程度暴露出各类安全与运行问题。
梳理这些事故可以看出,其中一部分问题出现在与社会车辆的互动过程中。自动驾驶系统需要在复杂交通流中完成判断,而人类驾驶行为的不确定性,使这一过程始终存在变量。另一类情况,则更多发生在复杂或非常规环境中,例如施工区域、临时障碍物或非标准道路条件,这些场景往往对系统的感知与路径规划能力提出更高要求。除此之外,还有一部分事件并非由单一交通行为触发,而是源于系统异常本身,例如车辆在运行中出现停滞或功能失效,对道路通行效率产生直接影响。
其中几起典型事故,更直观暴露了行业的共性短板。2025年8月,美国奥斯汀发生Waymo校车违规事件,一辆Waymo无人车面对展开“停”牌、闪烁红灯的停靠校车,虽短暂停车却在学生仍在上车时驶越,此事暴露了系统对特殊交通规则的理解不足与远程协助的漏洞,即便Waymo后续推送软件补丁、召回车辆,类似的违规时间后续至2026年仍有发生。
2025年12月,湖南株洲一辆哈啰无人车撞伤两名骑行者,这是国内首例Robotaxi伤人事故。事故核心的是系统在突发、非标准场景下的感知与决策滞后——人类司机能凭经验预判非常规行为,而当前自动驾驶系统对这类低概率场景的应对能力仍显不足。
种种事件所反映的,是在低概率、高不确定性场景下,仍有部分的长尾问题,当下Robotaxi技术还没法满足。
但需要指出的是,将所有问题简单归因为“技术不足”,同样并不准确。在不少案例中,外部交通参与者的行为、道路条件、运营维护以及偶发因素,都会对结果产生重要影响。换言之,当前Robotaxi所面对的,并不是单一技术瓶颈,而是一个多因素交织的系统性问题。
从行业层面来看,这些事件正在产生连锁反应:首先,公众对安全性的感知变得更加敏感,单次事件的传播效应被不断放大,将会直接降低用户的选择意愿。其次,监管层面对商业化节奏的态度也会趋于审慎,可能会导致相关政策空间进行动态调整,延缓行业商业化推进节奏。最后,一系列事故会带来成本压力的上升,将持续考验企业的运营能力与盈利模型。事故本身难以完全避免,但事故率如果不能显著低于人类司机,Robotaxi“更安全、更便宜”的商业逻辑将受到根本挑战。
归根结底,Robotaxi的竞争,并不只取决于实验室里的技术指标,而在于其能否在真实、复杂且不可预测的城市环境中,稳定地提供服务。当技术能力、系统可靠性与公众信任形成正向循环时,商业化才有可能真正落地。

 24小时热榜
24小时热榜




 热门视频
热门视频